Expert-Guided Imitation for Learning Humanoid Loco-Manipulation from Motion Capture
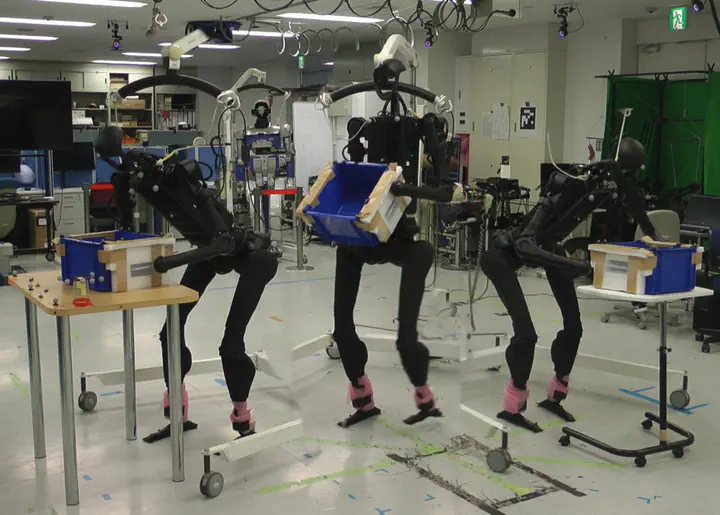 Loco-manipulation scenario with a H1 humanoid robot: picking a box up and droppping it off on another table.
Loco-manipulation scenario with a H1 humanoid robot: picking a box up and droppping it off on another table.Type
Publication
2026 IEEE/SICE International Symposium on System Integration (SII 2026)