Pierre-Alexandre Leziart
Pierre-Alexandre Leziart
Home
Publications
Gallery
Experience
Contact
Light
Dark
Automatic
Learning Humanoid Loco-manipulation with Constraints as Terminations
Pierre-Alexandre Léziart
,
Mitsuharu Morisawa
,
Fumio Kanehiro
February, 2026
PDF
Cite
Video
Website
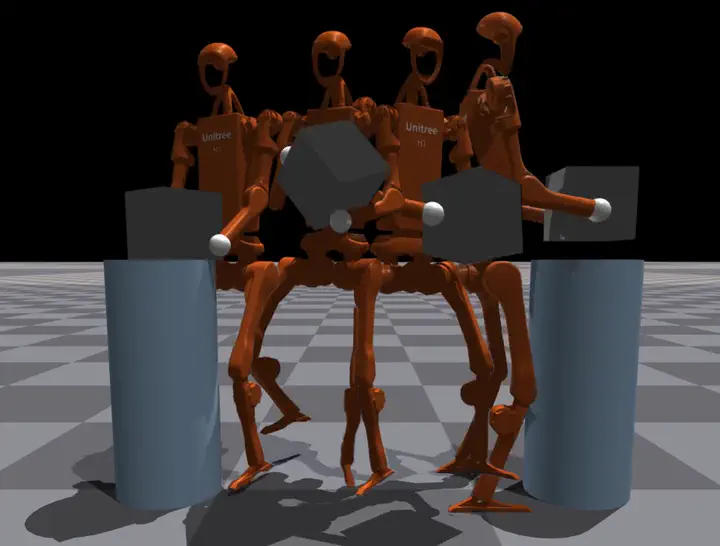
Loco-manipulation with H1 to transport a box with Constraints as Terminations.
Type
1
Publication
2026 IEEE/SICE International Symposium on System Integration (SII 2026)
Cite
×