Pierre-Alexandre Leziart
PostDoc in Robotics
Independent
About me
Postdoctoral fellow focusing on the design, implementation and improvement of state-of-the-art control architectures for legged robots. My research activities are motivated by all the challenges that remain to be tackled to control such complex mechatronic systems in a reliable way in real life situations. The advent of machine learning techniques in recent years has brought plenty of promising results, to the level of what has been achieved by more classical model-based approaches. I am convinced that performances can be pushed even further by combining both approaches to benefit from the best of both worlds. I also wish to push toward more explainability and more guarantees using these new methods so that they can be deployed in a safer and more thought-out manner.
- Legged Robotics
- Model Predictive Control
- Reinforcement Learning
- Torque Control
- Optimal Control
Qualified to be a university lecturer, 2026
French National Council of Universities
PhD in Robotics, 2022
LAAS-CNRS and University of Toulouse, France
MEng in Mechatronics, 2019
École Normale Supérieure de Rennes, France
Agrégation of Industrial Engineering Sciences, Electrical specialization, 2018
French Ministry of Higher Education and Research

Recent Publications
Gallery







Experience
Education & Qualifications
- Qualified for Section 61 “Computer engineering, control, signal processing”.
- This enables me to apply for Maître de conférences positions, which are similar to Assistant/Associate Professors in the French university system.
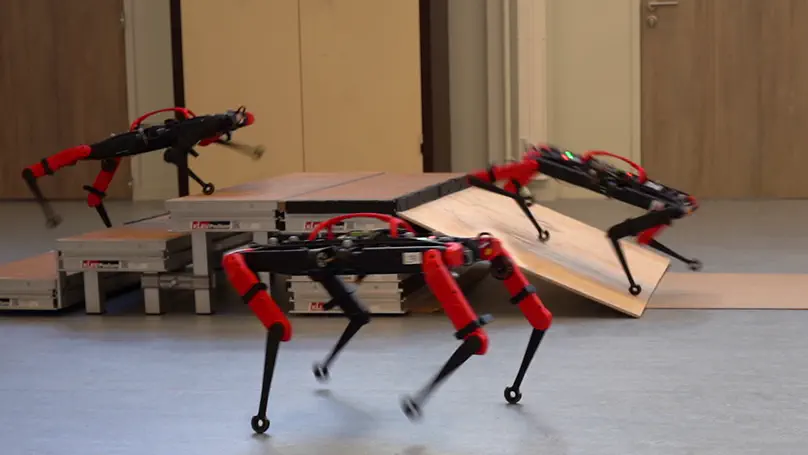
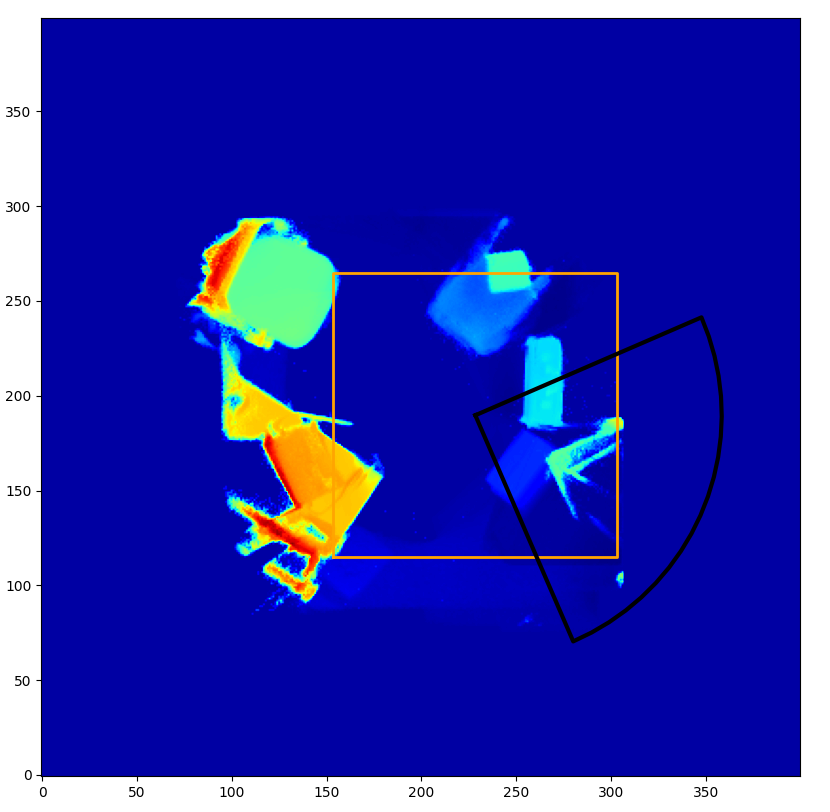
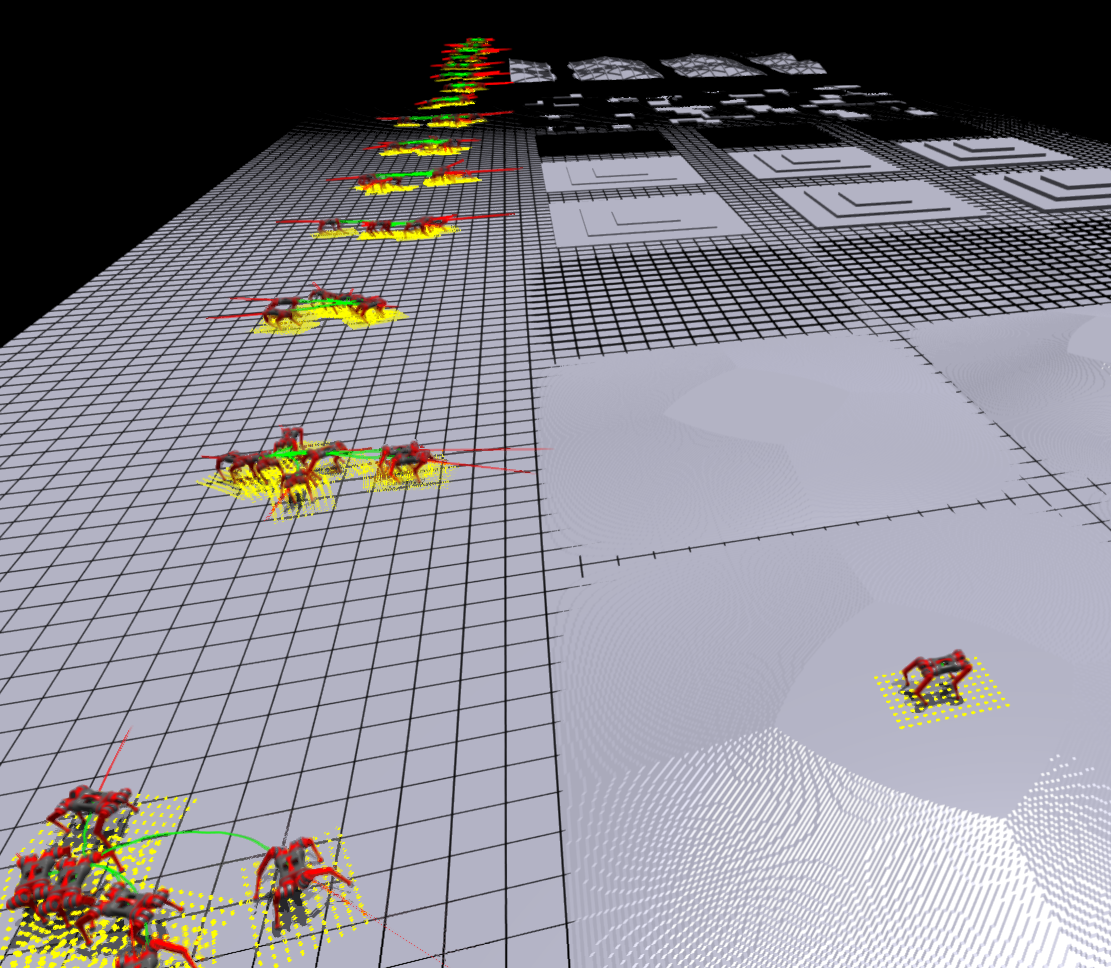
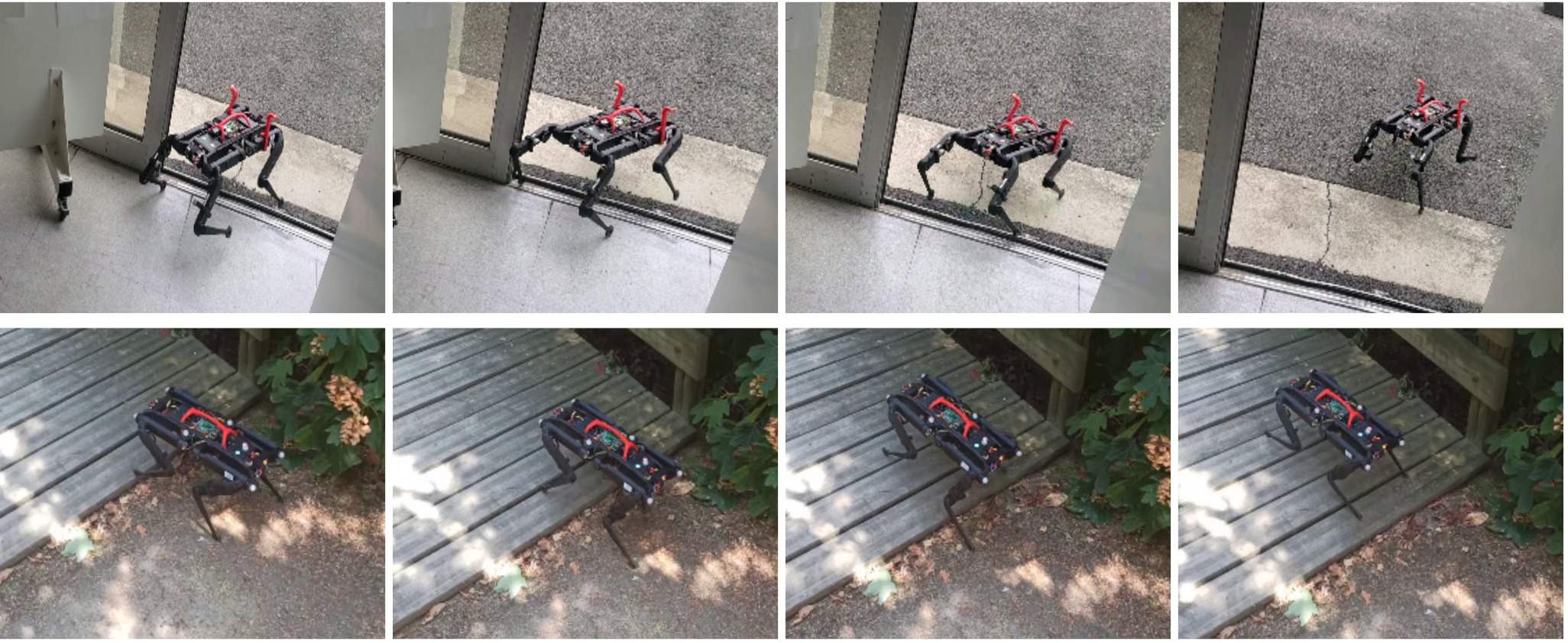
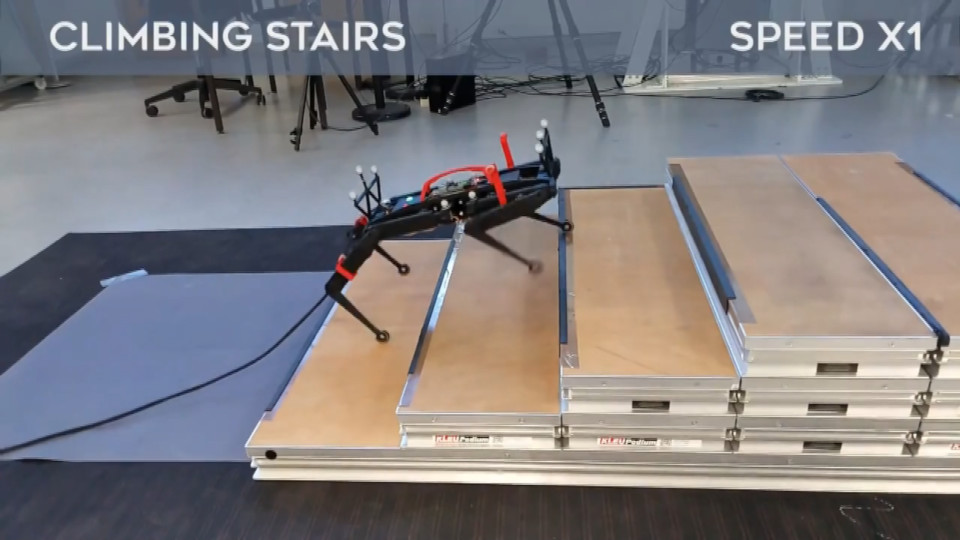
- Locomotion control of a lightweight quadruped robot
- Under the supervision of Philippe Souères and Thomas Flayols
- Issued by the University Toulouse 3 Paul Sabatier
- Defended October 17, 2022.
- Engineering of Complex Systems
- Academic exchange at Ecole Polytechnique Fédérale de Lausanne, Switzerland.
- Industrial Engineering Sciences, electrical specialization
- External exam, rank: 1st
- Engineering of Complex Systems
Contact
Feel free to contact me if you have any question about my work!